















Ecossistema Educacional
Robótica, maker, games, formação e soluções educacionais para escolas que buscam inovação com resultado real
Robótica, maker, games, formação e soluções educacionais para escolas que buscam inovação com resultado real
A Jovem Engenheiro integra plataformas, kits educativos, operação em escolas e rede de parceiros para oferecer aprendizagem prática, criativa e tecnológica em diferentes etapas da formação.
A Jovem Engenheiro integra plataformas, kits educativos, operação em escolas e rede de parceiros para oferecer aprendizagem prática, criativa e tecnológica em diferentes etapas da formação.


Experiência e Confiança
Há 25 anos a Jovem Engenheiro leva tecnologia, criatividade e aprendizagem prática para escolas que valorizam inovação.
Há 25 anos a Jovem Engenheiro leva tecnologia, criatividade e aprendizagem prática para escolas que valorizam inovação.
3 plataformas educacionais
• 7 franqueados
• Atuação em 15 escolas
• kits educativos Conekt Education
3 plataformas educacionais
• 7 franqueados
• Atuação em 15 escolas
• kits educativos Conekt Education
Soluções Educacionais
Conhecer todas as soluções
FALE CONOSCO
Ver todos
FALE CONOSCO
Soluções para escolas que querem inovar com segurança
Implantamos programas de robótica, computação e cultura maker com suporte, organização e alto valor percebido por alunos e famílias.
1
Implantação organizada e sem complicação
2
Mais engajamento e valor percebido por alunos e famílias
3
Material, suporte e acompanhamento para a escola
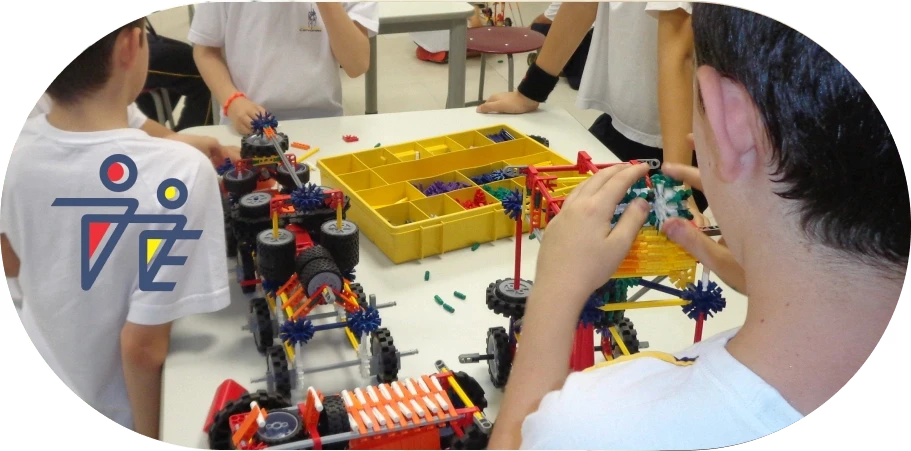
Aprendizagem prática
Aprendizagem prática para desenvolver lógica, criatividade e autonomia
Aprendizagem prática para desenvolver lógica, criatividade e autonomia
A Jovem Engenheiro transforma tecnologia em experiências concretas de aprendizagem. Os alunos constroem, programam, testam e criam projetos que fortalecem o pensamento lógico, a resolução de problemas e o protagonismo.
A Jovem Engenheiro transforma tecnologia em experiências concretas de aprendizagem. Os alunos constroem, programam, testam e criam projetos que fortalecem o pensamento lógico, a resolução de problemas e o protagonismo.

Pensamento Lógico
Analisar, testar e construir soluções com tecnologia.
Aprendizagem prática
Criar projetos reais de forma envolvente e significativa.
Resolução de problemas
Experimentar, ajustar, errar e melhorar continuamente.
Autonomia e criatividade
Desenvolver ideias, protótipos e projetos com protagonismo.

Depoimentos
Resultados e confiança
Histórias e percepções que fortalecem a escola.




Depoimentos
Resultados e confiança
Histórias e percepções que fortalecem a escola.
Depoimentos
Resultados e confiança
Histórias e percepções que fortalecem a escola.
1
Educasteam
Plataforma de robótica, maker, STEAM, IoT e aulas na grade para Educação Infantil, Ensino Fundamental e programas extracurriculares.
1
Educasteam
Plataforma de robótica, maker, STEAM, IoT e aulas na grade para Educação Infantil, Ensino Fundamental e programas extracurriculares.
2
Intereducar
Plataforma com cursos de games para desenvolver criatividade, lógica, narrativa interativa e pensamento computacional.
2
Intereducar
Plataforma com cursos de games para desenvolver criatividade, lógica, narrativa interativa e pensamento computacional.
3
Educonekt
Plataforma com cursos livres, técnicos, universitários e de pós-graduação em parceria com instituições reconhecidas.
3
Educonekt
Plataforma com cursos livres, técnicos, universitários e de pós-graduação em parceria com instituições reconhecidas.
4
Conekt Education
Marca de kits educativos e soluções físicas para experiências práticas em robótica, construção e cultura maker.
4
Conekt Education
Marca de kits educativos e soluções físicas para experiências práticas em robótica, construção e cultura maker.
Nosso Ecossistema
Quatro frentes conectadas para diferentes idades, formatos e objetivos
Quatro frentes conectadas para diferentes idades, formatos e objetivos
A Jovem Engenheiro integra plataformas educacionais, kits educativos, operação em escolas e rede de parceiros para conectar diferentes públicos, formatos e etapas da aprendizagem.
A Jovem Engenheiro integra plataformas educacionais, kits educativos, operação em escolas e rede de parceiros para conectar diferentes públicos, formatos e etapas da aprendizagem.
Robótica
Cursos Extracurriculares
Programação
Modelagem 3D
Dev. de Games

Educação tecnológica
Há 25 anos preparando alunos para os desafios do futuro.
Fale com nossa equipe
Converse com nossa equipe e entenda como o ecossistema Jovem Engenheiro pode se aplicar à sua realidade
Estamos prontos para apresentar nossas frentes de atuação, esclarecer dúvidas e indicar os caminhos mais adequados para escolas, parceiros e projetos educacionais.
Fale com nossa equipe